|
|
|
JKB
Department of Clinical
Engineering
Faculty of Biomedical Engineering
Toin University of
Yokohama
Jouhou Kenkou Biyou Laboratoy
(Information, Health & Beauty Lab)
|
桐 蔭 横 浜 大 学
医用工学部 臨床工学科
情報および美容と健康のための
医用システム統合工学研究室
|
|
 |
★ 研究分野(Research Fields)
|
|
 医用システム統合工学に関する研究 医用システム統合工学に関する研究
(Medical System Integration Engineering)
 福祉環境工学に関する研究 福祉環境工学に関する研究
(Welfare & Environment Engineering)
 美容と健康,抗加齢に関する研究 美容と健康,抗加齢に関する研究
(Magnetic therapy for Health,Beauty & Anti-aging)
 教育工学に関する研究 教育工学に関する研究
(Educational Technology)
 ロボティクス・メカトロニクスに関する研究 ロボティクス・メカトロニクスに関する研究
(Robotics & Mechatronics)
|
|
| |
|
|
| |
 |
★ 主要な論文(Selected Paper)
- Takeshi Morishita, Osamu TOJO: "Integer inverse kinematics for arm
control of compact autonomous robot ", In Journal of Artificial Life
and Robotics, Volume 22(4), pp435-442,Jun.2017, 10.1007/s10015-017-0379-9,
Springer.
Best Paper Award :最優秀論文賞 (AROB 22nd 2017)
- Takeshi Morishita: "Simple observation sensor system and local community
network model ", In Journal of Artificial Life and Robotics,Volume
22(3), pp289-295, 2017, DOI 10.1007/s10015-017-0363-4, Springer.
Kanagawa Prefectural Governor Award : 神奈川県知事賞
- 森下 武志, 山本 愛里紗, 市山 友里香, :"振動を用いた人工心肺用動脈フィルター内残留気泡除去装置の試作",日本医療機器学会論文集.,
Vol. 87, No3, pp337-340, 2017)
- Takeshi MORISHITA, Osamu TOJO: "Integer Inverse Kinematics Method
Using Fuzzy Logic ", In Journal of Intelligent Service Robotics, Volume
6(2), pp101-108, 2013, DOI 10.1007/s11370-012-0115-1, Springer.
- Takeshi Morishita:"Creating Attraction for Technical Education Material
and Educational Benefit", In Journal of Robotics and Mechatronics,Vol.23,
N05, pp.665-675, 2011.
- Takeshi Morishita, Tetsuro Yabuta:"Stereo Vision :", InTech Education and Publishing Book, 372 pages, ISBN 978-953-7619-22-0, pp221-234, 2008.
- 森下武志,藪田哲郎:"小型自律ロボットのためのCMOSイメージセンサを用いた小型両眼視覚ワンボードセンサモジュールの開発と適用",日本機械学会論文集(C).Vol.73,
No726, pp363-370, 2007.
- 森下武志,藪田哲郎:"視覚認識行動自律型ロボットを用いた高校生向け技術教育プログラムの実践",日本機械学会論文集(C).Vol.73 No.725,
pp16-23, 2007.
- Kei Okada, Takeshi Morishita, Marika Hayashi, Masayuki Inaba, Hirochika
Inoue : "Design and Development of Small Stereo Vision Sensor Module
for Small Self-Contained Autonomous Robots", Journal of Robotics and
Mechatronics, Vol. 17, No. 3, pp 248-254, 2005.
- Takeshi Morishita, Kei Okada, Masayuki Inaba, Hirochika Inoue."Development
of the stereo vision sensor module for a small autonomous robot using a
small camera for cellular phone ", Proceedings of the Robotics and
Mechatronics Conference 2004, 2P1-L2-39, DOI:10.1299 / jsmermd.2004.162_4.
|
さらに見る(View more)>> 
|
★ 学術研究活動 (Academic Research activities)
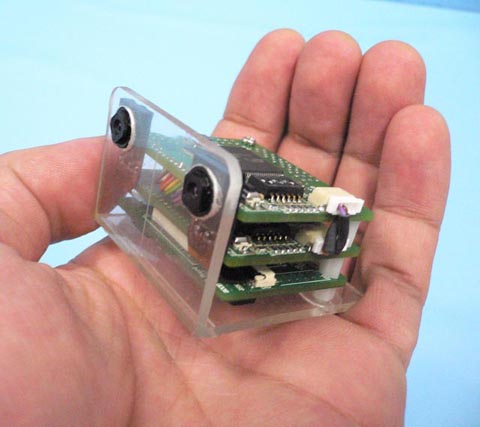
3次元空間認識可能な小型両眼視覚センサモジュールとそれを適用した3次元認識完全自律型小型ヒューマノイドロボット
Compact Stereo Vision 3D-Recognition Robots and Application to 3 &
23DOF Self-Contained Autonomous Robots
(2004-2011)
|
Click video |
|
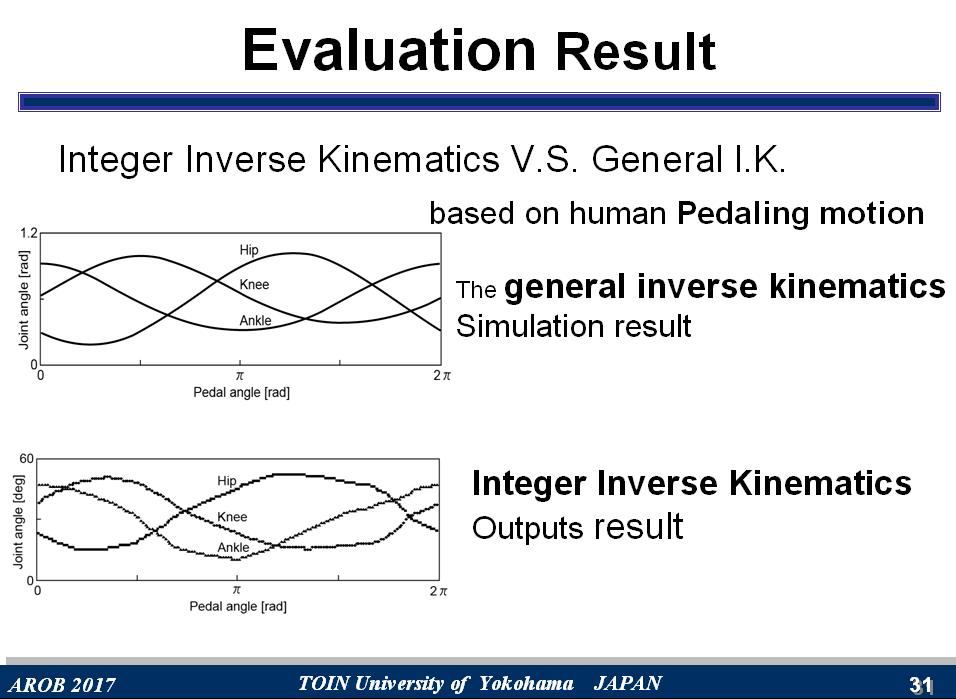
整数演算のみで逆運動学を実現する整数逆運動学アルゴリズムと完全自律型小型ヒューマノイドロボットへの適用
Integer Inverse Kinematics and Application to Small Autonomous Humanoid Robots
(2011-2017)
|
Click video |
|
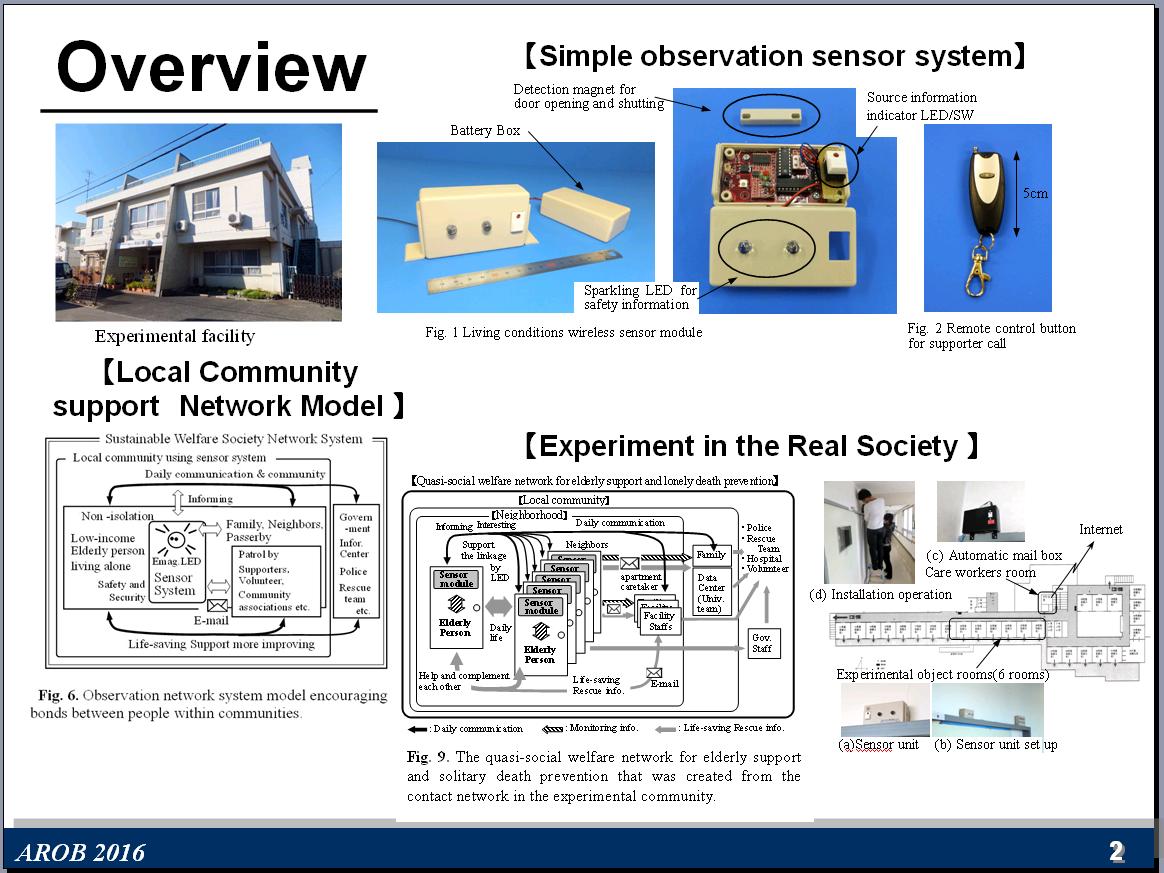
孤独死防止をめざした低所得者のための単居高齢者支援システムと高齢者支援地域社会モデルを適用した社会実験
Simple observation sensor system and local community network model
- Real society experiment on solitary death prevention for low-income
single elderly residents in collective housing -
(2010-2016)
|
 |
Abstract: This paper proposes a sensor system for monitoring elderly residents
living alone in low-income housing, and a local community network model
to support these residents. This observation sensor system estimates living
conditions by detecting entry point door movement, and safety information
on the target residents is delivered to family and support staff via e-mail.
Additionally, the sensor unit is equipped with a networked flash-lighting
and e-mail warning function to notify those in the community about accidents.
Design and development costs were minimized by dispersing the flash-light
emitting unit of the sensor unit on multiple units, making this a feasible
option for low-income elderly residents. In addition, we implemented this
sensor system and operated the local community network model at a collective
housing to test its efficacy as a new system in real world conditions.
We present that this community network prevents the isolation of the elderly
residents using the sensor system installed in their community, and improves
communication between residents, their families, and their neighbors, thereby
improving their safety. We also show that the community network prevents
the isolation of elderly people by quietly keeping constant involvement
with people in broader society, and is a social network system aimed at
preventing solitary death. |
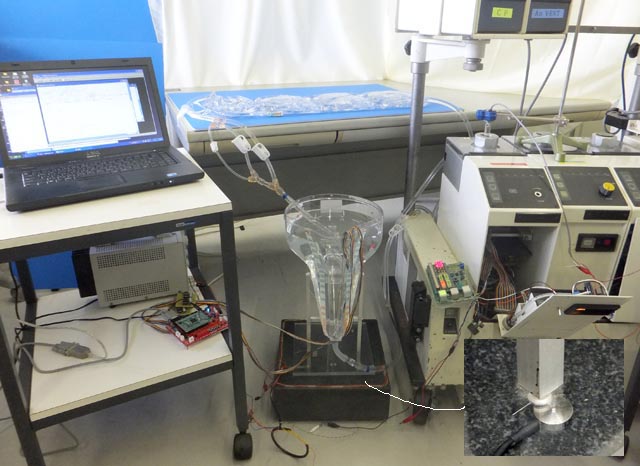
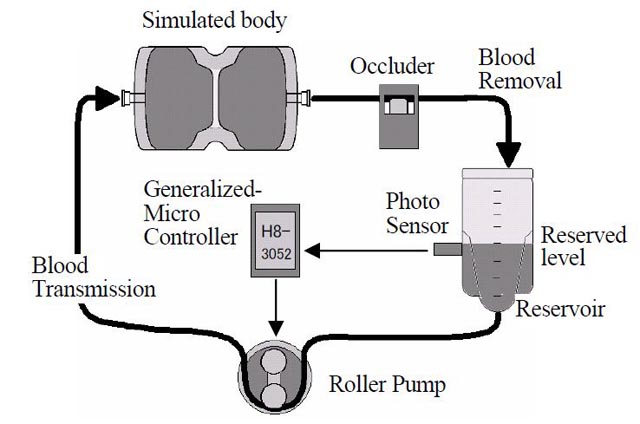
貯血槽の重量計測による人工心肺装置の貯血レベル維持制御に関する自動化基礎研究と応用実験
Automatic control system with compact microcomputer at the reservoir level
in artificial heart-lung machine
2013-
|
Click video |
 |
| |
|
 |
| |
|
★ 森下教授の実践!ロボットワールド (Professor Morishita's ROBOCON World)
競技ロボット編 (Robot Athletes)
|

Click video
|
マイコンカー競技(Microcomputer Controlled Car Race)
コースとなるラインに沿って、より速く走行させるロボット競技。
これらのロボットはマイコンカー、またはライントレースロボットと呼ばれ、高速な情報処理と高精度な機械的制御(アクセルワークとハンドリング)が求められる。
Robot race competing for running speed (running time) along the line on
the course.
They are called the MICOM-CAR (microprocessing car) and or the line tracing
robots in Japan.
High speed information processing and high mechanical hardware control
(accelerator work and handling) are required. |
| |
|

Click video |
相撲ロボット競技(Sumo Robot Wrestling)
このロボットは、人の操作は無く、マイコンによる自動制御の自律型ロボットタイプ。競技は、2台のロボットが直径1.5mの土俵の上で押し合い、押し出した側が勝ちになる競技。ロボットの性能や戦術の駆け引きだけでなく心理戦が勝利のカギを握る難しい戦いである。
This robot is an autonomous robot type of automatic control by a microcomputer
without human operation.
This is a battle where these two robots push each other on a ring of 1.5
m in diameter.
Winning is to push out outside the ring.The rules are simple.
Besides robot performance and tactical negotiation, psychological warfare is also a key to victory and it is very difficult to win.
|
|
|
|
| Copyright(C) 2014 JKB All Rights Reserved |
|
|
|